Autonomous Waypoint Navigator
Software system enabling GPS navigation for a mobile platform using Raspberry Pi 5.
Overview
View the Git repository.
About
This software program enables autonomous waypoint navigation for a mobile platform using a Raspberry Pi 5.
The system will use GPS data to guide the platform from one location to another along a predefined series of static waypoints.
Hardware Requirements
Raspberry Pi 5 (16GB)
Raspberry Pi 5 charger (CanaKit 45W USB-C Power Supply with PD for Raspberry Pi 5 (27W @ 5A))
GPS Dongle (VK-162 G-Mouse USB GPS Dongle Navigation Module External GPS Antenna Remote Mount USB GPS Receiver for Raspberry Pi Support Google Earth Window Linux Geekstory)
A flash drive (8GB+)
Installation
Plug charger and GPS dongle into your Raspberry Pi.
Flash Raspberry Pi OS Lite (64-bit) onto your Raspberry Pi 5 (https://www.raspberrypi.com/software/). Make sure to enable ssh and wifi in the Raspberry Pi Imager.
Ssh into your Raspberry Pi and update the OS using
sudo apt update && sudo apt upgrade -y.Install git using
sudo apt install git -yso that we can clone this software project through git.Clone this project using
git clone https://github.com/kimsh02/awns-rpi5.git.Go into the project directory with
cd awns-rpi5.Run
sudo ./scripts/install.sh. This will install, build, and set up the necessary tools, and then build and install the executable system-wide.Copy paste this one-liner if you want to run the shell commands above in one go:
1 2 3
sudo apt update && sudo apt upgrade -y && sudo apt install git -y && git clone https://github.com/kimsh02/awns-rpi5.git && cd awns-rpi5 && sudo ./scripts/install.sh
Usage
You should now be able to invoke the program with the command
awns-rpi5 COMMAND.Help message print:
1
2
3
4
5
6
7
8
9
10
11
12
13
Usage: awns-rpi5 COMMAND
Autonomous waypoint navigation system for a mobile platform using Raspberry Pi 5
Commands:
gpspoll Poll GPS to get a reading
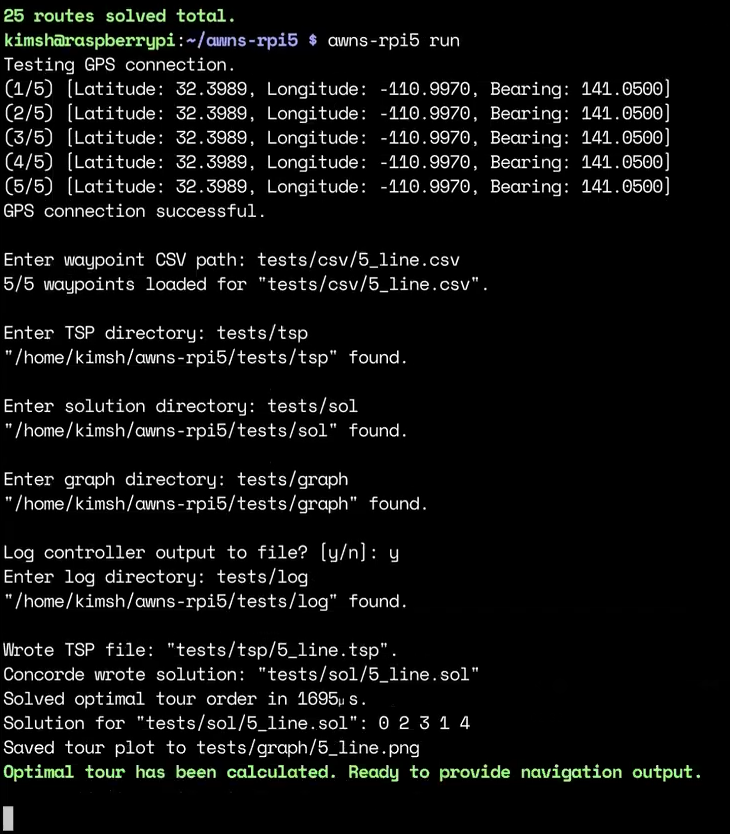
run Use GPS data to guide platform along a predefined series of static waypoints and output logs
solve Use Concorde TSP to solve directory of CSV waypoint files and output solutions as plotted graphs
help Show this help message and exit
Examples:
awns-rpi5 run
awns-rpi5 solve
Concorde TSP Solver
Concorde is a standalone executable written in C and is considered to be the world’s fastest traveling salesman problem (TSP) solver to date.
The
install.shbuilds and installs Concorde to the system, and the program relies on invokingconcordeto generate the optimal visiting order of waypoints.As a sidenote, technically, the system invokes an alternate build of Concorde called
linkernwhich uses the Lin-Kernighan heuristic in place of the custom heuristic used by the fullconcordebinary. The Lin-Kernighan heuristic provides near-optimal solutions to TSP but does not offer provably optimal solutions which are guaranteed only by theconcordeexecutable. The full build ofconcordewas not achievable for this project as a specific required libraryqsoptwas determined to be too out-of-date to be refactored in a reasonable amount of time to be in compliance with the C++23 standard (which is a build requirement for this project).
File Input/Output
- The
awns-rpi5program invoked withrunorsolvewill expect the user to provide certain files and/or directories and is explained below.
CSV Input
The program will read in a series of static waypoints via a
.csvfile.Must have two columns with headers specifying latitude and longitude and in that order.
A
tests/csvdirectory is included in this repo providing test CSV files.
TSP Output
The program will generate a
.tspfile for each.csvfile and requires a directory to output these files.The
.tspfile contains specially converted GPS coordinates and specifies the traveling salesman problem in a format that Concorde understands.The
.tspfile is used to communicate to the Concorde TSP solver which reads in the.tspfile to solve the optimal/near-optimal tour order of waypoints.A
tests/tspdirectory is included in this repo for convenient use.
SOL Output
The Concorde TSP solver generates a
.solfile that specifies the solved tour order of waypoints and requires a directory to output these files.The program will read in the
.solfile to get the solved tour order.A
tests/soldirectory is included in this repo for convenient use.
Graph Output
The program invokes a Python script (installed through
install.sh) to generate a.pngplot visualization of the tour order solved by Concorde and requires a directory to output these files.A
tests/graphdirectory is included in this repo for convenient use.
LOG Output
The program in
runmode optionally provides writing navigation output to a.logfile and requires a directory to output these files.A
tests/logdirectory is included in this repo for convenient use.
API
- Simple API that can be integrated with development of a downstream motor controller.
Headers
#include "navigator.hpp"
Documentation
Navigator(int argc, const char **argv) noexcept- @brief Constructor for ‘Navigator` object.
- @param argc The argc from
int main(int argc, const char **argv). - @param argv The argv from
int main(int argc, const char **argv). - @return Navigator object.
void start(void)- @brief Invoke CLI to setup Navigator object. Must be called after object initialization.
void setProximityRadius(double r) noexcept- @brief Setter for proximity radius for determining arrival at each waypoint.
- @param r Proximity radius in meters. Cannot be set to less than 1.0 meters (will result in default of 1.0).
void setSimulationVelocity(double v) noexcept- @brief Optional setter for simulated downstream motor controller speed. If set, navigation output is generated based on simulated speed, else navigation output is generated based on GPS position.
- @param v Simulated velocity in meters per second.
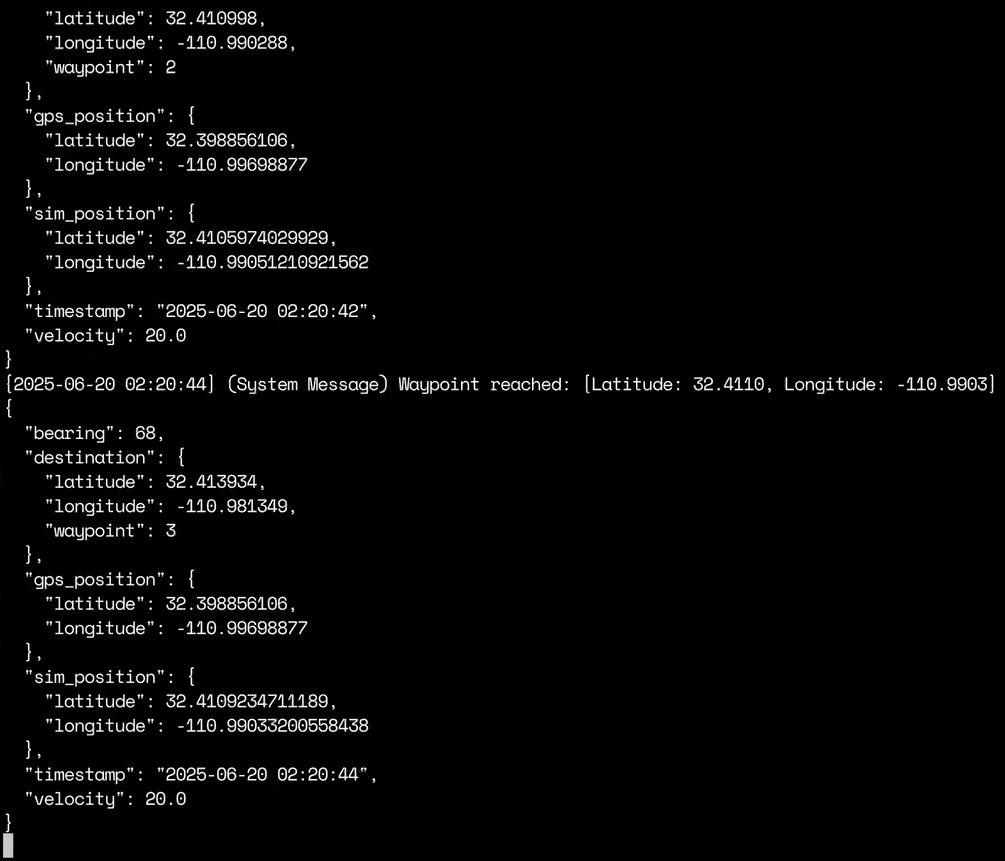
std::optional<json> getOutput(void)- @brief Spits out navigation output in JSON format and prints output to
stdoutand optionally to a.logfile. Must invokestart(void)andsetProximityRadius(double r)beforehand. - @return
nlohmann::jsonobject. JSON key-value of interest for downstream controller is ‘bearing’ whose value is reported as degrees from true North.
- @brief Spits out navigation output in JSON format and prints output to
- Please see
main.cppfor example usage of the API.
Development Notes
This project is compiled using CMake and its build configuration should be managed through
CMakeLists.txt.- There is a
memory,thread, andreleaseversion of the build and should be specified through CMake. Whilethreadshould not be of interest as this program is single-threaded,memoryoffers compilation with a memory/address sanitizer (through Clang) for debugging, andreleaseoffers a compilation of the software withO3optimization enabled and all other debugging flags disabled.
- There is a
Script
concorde-macos-arm.shinstalls Concorde/Linkern binary on an ARM-based MacOS machine for local development if you have a Mac.Script
dev.shis a convenience script that re-pulls from Git and re-installs executable on Raspberry Pi 5..gitlab-ci.ymlconfigures a CI/CD pipeline on GitLab that replicates the exact build ofawns-rpi5on a Raspberry PI 5 OS to ensure that the project is building and running properly without manually having to rebuild on the Raspberry Pi 5 every time (which is time consuming).